Ce este camera RGB D?
rezumat
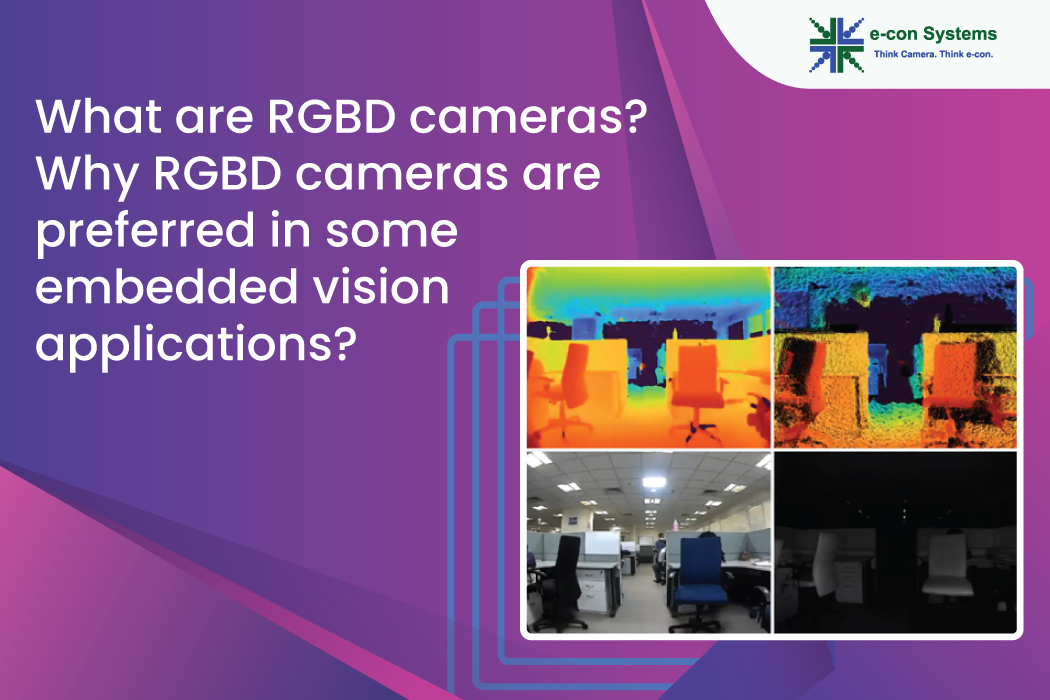
RGB-D se referă în general la datele roșii, verzi, albastre plus de adâncime capturate de senzorii RGB-D. O imagine RGB-D oferă o informație de adâncime pe pixel aliniată cu pixeli de imagine corespunzători.
Rezumat – Camerele Lidar și RGB sunt senzori utilizați în mod obișnuit în vehicule autonome. Cu toate acestea, ambele au limitări: Lidar oferă o adâncime exactă, dar este rară în rezoluție verticală și orizontală; Imaginile RGB oferă o textură densă, dar lipsesc informații de profunzime.
Precizia ambelor sisteme a fost de aproximativ 1.00, care este acceptabil din punct de vedere clinic.
Senzori RGB-D pentru consumatori: Cu toate acestea, acești senzori costă în jur de 10.000 USD fiecare. În schimb, noile senzori de consum RGB-D costă mai puțin de 200 USD. Tehnologia de detectare a adâncimii per pixel care este utilizată în camerele RGB-D de consum a fost dezvoltată de Primessense.
Așa cum am menționat mai sus, camera RGB-D nu reușește să capteze obiecte și suprafețe realizate din materiale transparente, reflectoare și absorbante. În plus, atunci când cel puțin două camere sunt utilizate pentru a vizualiza aceeași scenă, problema de interferență scade calitatea hărții de adâncime estimate.
Adăugarea datelor RGB la o cameră de senzare a adâncimii 3D, harta norului sau a adâncimii permite identificarea obiectelor mai eficient pentru recunoașterea sau detectarea modelului. Acest lucru este util în special în aplicațiile care trebuie să identifice tipul și natura obiectelor din scenă, împreună cu măsurarea profunzimii lor.
Camerele Lidar vs: Cu toate acestea, diferența fundamentală dintre LIDAR și tehnologia camerei este că Lidar emite lumina pe care o vede, în timp ce camerele nu sunt. Acest lucru îi oferă lui Lidar capacitatea de a calcula distanțe incredibil de exacte față de multe obiecte care sunt detectate simultan.
Așa cum am menționat mai sus, camera RGB-D nu reușește să capteze obiecte și suprafețe realizate din materiale transparente, reflectoare și absorbante. În plus, atunci când cel puțin două camere sunt utilizate pentru a vizualiza aceeași scenă, problema de interferență scade calitatea hărții de adâncime estimate.
O imagine RGB-D este pur și simplu o combinație între o imagine RGB și imaginea de adâncime corespunzătoare a acesteia. O imagine de adâncime este un canal de imagine în care fiecare pixel se referă la o distanță între planul imaginii și obiectul corespunzător în imaginea RGB.
Așa cum am menționat mai sus, camera RGB-D nu reușește să capteze obiecte și suprafețe realizate din materiale transparente, reflectoare și absorbante. În plus, atunci când cel puțin două camere sunt utilizate pentru a vizualiza aceeași scenă, problema de interferență scade calitatea hărții de adâncime estimate.
Cel mai mic senzor de imagine disponibil comercial este OV6948, care măsoară 0.575 mm x 0.575 mm x 0.232 mm, realizat de Omnivision Technologies, Inc. (STATELE UNITE ALE AMERICII).
Intrebari si raspunsuri
1. Ce înseamnă RGBD pe o cameră?
RGB-D se referă în general la datele roșii, verzi, albastre plus de adâncime capturate de senzorii RGB-D. O imagine RGB-D oferă o informație de adâncime pe pixel aliniată cu pixeli de imagine corespunzători.
2. Care este diferența dintre camera RGB-D și Lidar?
Rezumat – Camerele Lidar și RGB sunt senzori utilizați în mod obișnuit în vehicule autonome. Cu toate acestea, ambele au limitări: Lidar oferă o adâncime exactă, dar este rară în rezoluție verticală și orizontală; Imaginile RGB oferă o textură densă, dar lipsesc informații de profunzime.
3. Cât de precis este o cameră RGB-D?
Precizia ambelor sisteme a fost de aproximativ 1.00, care este acceptabil din punct de vedere clinic.
4. Cât costă camerele RGB-D?
Senzori RGB-D pentru consumatori: Cu toate acestea, acești senzori costă în jur de 10.000 USD fiecare. În schimb, noile senzori de consum RGB-D costă mai puțin de 200 USD. Tehnologia de detectare a adâncimii per pixel care este utilizată în camerele RGB-D de consum a fost dezvoltată de Primessense.
5. Care sunt dezavantajele camerei RGB-D?
Așa cum am menționat mai sus, camera RGB-D nu reușește să capteze obiecte și suprafețe realizate din materiale transparente, reflectoare și absorbante. În plus, atunci când cel puțin două camere sunt utilizate pentru a vizualiza aceeași scenă, problema de interferență scade calitatea hărții de adâncime estimate.
6. Care sunt avantajele camerelor RGB-D?
Adăugarea datelor RGB la o cameră de senzare a adâncimii 3D, harta norului sau a adâncimii permite identificarea obiectelor mai eficient pentru recunoașterea sau detectarea modelului. Acest lucru este util în special în aplicațiile care trebuie să identifice tipul și natura obiectelor din scenă, împreună cu măsurarea profunzimii lor.
7. Care este mai bun Lidar sau camere?
Camerele Lidar vs: Cu toate acestea, diferența fundamentală dintre LIDAR și tehnologia camerei este că Lidar emite lumina pe care o vede, în timp ce camerele nu sunt. Acest lucru îi oferă lui Lidar capacitatea de a calcula distanțe incredibil de exacte față de multe obiecte care sunt detectate simultan.
8. Care sunt dezavantajele camerei RGB-D?
Așa cum am menționat mai sus, camera RGB-D nu reușește să capteze obiecte și suprafețe realizate din materiale transparente, reflectoare și absorbante. În plus, atunci când cel puțin două camere sunt utilizate pentru a vizualiza aceeași scenă, problema de interferență scade calitatea hărții de adâncime estimate.
9. Care este diferența dintre RGB și RGB-D?
O imagine RGB-D este pur și simplu o combinație între o imagine RGB și imaginea de adâncime corespunzătoare a acesteia. O imagine de adâncime este un canal de imagine în care fiecare pixel se referă la o distanță între planul imaginii și obiectul corespunzător în imaginea RGB.
10. Care sunt dezavantajele camerei RGB-D?
Așa cum am menționat mai sus, camera RGB-D nu reușește să capteze obiecte și suprafețe realizate din materiale transparente, reflectoare și absorbante. În plus, atunci când cel puțin două camere sunt utilizate pentru a vizualiza aceeași scenă, problema de interferență scade calitatea hărții de adâncime estimate.
11. Care este cea mai mică cameră RGB?
Cel mai mic senzor de imagine disponibil comercial este OV6948, care măsoară 0.575 mm x 0.575 mm x 0.232 mm, realizat de Omnivision Technologies, Inc. (STATELE UNITE ALE AMERICII).
[wPremark preset_name = “chat_message_1_my” picon_show = “0” fundal_color = “#e0f3ff” padding_right = “30” padding_left = “30” 30 “border_radius =” 30 “] Ce înseamnă RGBD pe cameră
RGB-D se referă în general la datele roșii, verzi, albastre plus de adâncime capturate de senzorii RGB-D. O imagine RGB-D oferă o informație de adâncime pe pixel aliniată cu pixeli de imagine corespunzători.
[/wpremark]
[wPremark preset_name = “chat_message_1_my” picon_show = “0” fundal_color = “#e0f3ff” padding_right = “30” padding_left = “30” 30 “border_radius =” 30 “] Care este diferența dintre camera RGB-D și Lidar
Rezumat – Camerele Lidar și RGB sunt senzori utilizați în mod obișnuit în vehicule autonome. Cu toate acestea, ambele au limitări: Lidar oferă o adâncime exactă, dar este rară în rezoluție verticală și orizontală; Imaginile RGB oferă o textură densă, dar lipsesc informații de profunzime.
[/wpremark]
[wPremark preset_name = “chat_message_1_my” picon_show = “0” fundal_color = “#e0f3ff” padding_right = “30” padding_left = “30” 30 “border_radius =” 30 “] Cât de exactă este camera RGB-D
Precizia ambelor sisteme a fost de aproximativ 1.00, care este acceptabil din punct de vedere clinic.
[/wpremark]
[wPremark preset_name = “chat_message_1_my” picon_show = “0” fundal_color = “#e0f3ff” padding_right = “30” padding_left = “30” 30 “border_radius =” 30 “] Cât costă camerele RGB-D
Senzori RGB-D pentru consumatori
Cu toate acestea, acești senzori costă în jur de 10.000 USD fiecare. În schimb, noile senzori de consum RGB-D costă mai puțin de 200 USD. Tehnologia de detectare a adâncimii per pixel care este utilizată în camerele RGB-D de consum a fost dezvoltată de Primessense (http: // www.Primesense.com/ro/tehnologie/115-the-primesense-3d-senzor-soluție).
Cachedsimilar
[/wpremark]
[wPremark preset_name = “chat_message_1_my” picon_show = “0” fundal_color = “#e0f3ff” padding_right = “30” padding_left = “30” 30 “border_radius =” 30 “] Care sunt dezavantajele camerei RGB-D
Așa cum am menționat mai sus, camera RGB-D nu reușește să capteze obiecte și suprafețe realizate din materiale transparente, reflectoare și absorbante. În plus, atunci când cel puțin două camere sunt utilizate pentru a vizualiza aceeași scenă, problema de interferență scade calitatea hărții de adâncime estimate.
[/wpremark]
[wPremark preset_name = “chat_message_1_my” picon_show = “0” fundal_color = “#e0f3ff” padding_right = “30” padding_left = “30” 30 “border_radius =” 30 “] Care sunt avantajele camerelor RGBD
Adăugarea datelor RGB la o cameră de senzor de adâncime de adâncime a unei camere sau harta de adâncime a unei camere de detectare 3D permite identificarea obiectelor mai eficient pentru recunoașterea sau detectarea modelului. Acest lucru este util în special în aplicațiile care trebuie să identifice tipul și natura obiectelor din scenă, împreună cu măsurarea profunzimii lor.
[/wpremark]
[wPremark preset_name = “chat_message_1_my” picon_show = “0” fundal_color = “#e0f3ff” padding_right = “30” padding_left = “30” 30 “border_radius =” 30 “] Care este mai bun Lidar sau camere
Lidar vs camere
Cu toate acestea, diferența fundamentală dintre tehnologia LIDAR și Camera este că Lidar emite lumina pe care o vede, în timp ce camerele nu sunt. Acest lucru îi oferă lui Lidar capacitatea de a calcula distanțe incredibil de exacte față de multe obiecte care sunt detectate simultan.
[/wpremark]
[wPremark preset_name = “chat_message_1_my” picon_show = “0” fundal_color = “#e0f3ff” padding_right = “30” padding_left = “30” 30 “border_radius =” 30 “] Care sunt dezavantajele camerei RGB-D
Așa cum am menționat mai sus, camera RGB-D nu reușește să capteze obiecte și suprafețe realizate din materiale transparente, reflectoare și absorbante. În plus, atunci când cel puțin două camere sunt utilizate pentru a vizualiza aceeași scenă, problema de interferență scade calitatea hărții de adâncime estimate.
[/wpremark]
[wPremark preset_name = “chat_message_1_my” picon_show = “0” fundal_color = “#e0f3ff” padding_right = “30” padding_left = “30” 30 “border_radius =” 30 “] Care este diferența dintre RGB și RGB-D
O imagine RGB-D este pur și simplu o combinație între o imagine RGB și imaginea de adâncime corespunzătoare a acesteia. O imagine de adâncime este un canal de imagine în care fiecare pixel se referă la o distanță între planul imaginii și obiectul corespunzător în imaginea RGB.
[/wpremark]
[wPremark preset_name = “chat_message_1_my” picon_show = “0” fundal_color = “#e0f3ff” padding_right = “30” padding_left = “30” 30 “border_radius =” 30 “] Care sunt dezavantajele camerei RGB D
Așa cum am menționat mai sus, camera RGB-D nu reușește să capteze obiecte și suprafețe realizate din materiale transparente, reflectoare și absorbante. În plus, atunci când cel puțin două camere sunt utilizate pentru a vizualiza aceeași scenă, problema de interferență scade calitatea hărții de adâncime estimate.
[/wpremark]
[wPremark preset_name = “chat_message_1_my” picon_show = “0” fundal_color = “#e0f3ff” padding_right = “30” padding_left = “30” 30 “border_radius =” 30 “] Care este cea mai mică cameră RGB
Cel mai mic senzor de imagine disponibil comercial este OV6948, care măsoară 0.575 mm x 0.575 mm x 0.232 mm, realizat de Omnivision Technologies, Inc. (STATELE UNITE ALE AMERICII). Înregistrarea se bazează pe testarea produselor și cercetarea de piață realizată de Transparency Market Research din Pune, India, la 10 aprilie 2019.
[/wpremark]
[wPremark preset_name = “chat_message_1_my” picon_show = “0” fundal_color = “#e0f3ff” padding_right = “30” padding_left = “30” 30 “border_radius =” 30 “] Este RGB bun pentru ochi
Raspunsul este nu. Nu există nimic special în ceea ce privește iluminarea RGB și iluminarea cu LED -uri, lumina este ușoară și atâta timp cât intensitatea luminii vizibile se află în limite sigure, nu va dăuna ochilor nimănui. Dacă este ceva, luminile RGB sunt ca luminile LED, deoarece sunt mai sigure, deoarece nu produc lumină UV.
[/wpremark]
[wPremark preset_name = “chat_message_1_my” picon_show = “0” fundal_color = “#e0f3ff” padding_right = “30” padding_left = “30” 30 “border_radius =” 30 “] Care este diferența dintre camera de adâncime și camera RGB
Informațiile de adâncime sunt recuperate printr -o hartă/imagine de adâncime care este creată de un senzor de adâncime 3D, cum ar fi un senzor stereo sau un senzor de zbor. Camerele RGBD sunt capabile să facă o fuziune de la pixel-la-pixeli a datelor RGB și a informațiilor de profunzime pentru a livra ambele într-un singur cadru.
[/wpremark]
[wPremark preset_name = “chat_message_1_my” picon_show = “0” fundal_color = “#e0f3ff” padding_right = “30” padding_left = “30” 30 “border_radius =” 30 “] Cum funcționează senzorul RGBD
Senzorii RGB-D sunt un tip specific de dispozitive de sensibilitate la adâncime care funcționează în asociere cu o cameră senzor RGB (roșu, verde și albastru). Aceștia sunt capabili să mărească imaginea convențională cu informații de profunzime (legate de distanța de senzor) în mod per-pixel.
[/wpremark]
[wPremark preset_name = “chat_message_1_my” picon_show = “0” fundal_color = “#e0f3ff” padding_right = “30” padding_left = “30” 30 “border_radius =” 30 “] Care este dezavantajul lui Lidar
Un alt dezavantaj al utilizării datelor LIDAR pentru analiza terenului este dificultatea și incertitudinea interpretării și analizei datelor. Datele LIDAR pot oferi informații bogate și detaliate despre teren, dar poate fi, de asemenea, ambiguu și complex pentru interpretarea și analizarea.
[/wpremark]
[wPremark preset_name = “chat_message_1_my” picon_show = “0” fundal_color = “#e0f3ff” padding_right = “30” padding_left = “30” 30 “border_radius =” 30 “] Care sunt dezavantajele camerei Lidar
– Limitări ale dronei Lidarmuch Investiții mai mari în echipamente (în comparație cu alte tehnologii), deși este economic atunci când este utilizat la scară mare, poate fi costisitor pentru captarea datelor în zone mai mici.Precizia depinde foarte mult de calitatea și calibrarea componentelor scanerului, IMU și GNSS al sistemului.
[/wpremark]
[wPremark preset_name = “chat_message_1_my” picon_show = “0” fundal_color = “#e0f3ff” padding_right = “30” padding_left = “30” 30 “border_radius =” 30 “] Ce este senzorul argb d
Senzorii RGB-D sunt un tip specific de dispozitive de sensibilitate la adâncime care funcționează în asociere cu o cameră senzor RGB (roșu, verde și albastru). Aceștia sunt capabili să mărească imaginea convențională cu informații de profunzime (legate de distanța de senzor) în mod per-pixel.
[/wpremark]
[wPremark preset_name = “chat_message_1_my” picon_show = “0” fundal_color = “#e0f3ff” padding_right = “30” padding_left = “30” 30 “border_radius =” 30 “] Care este diferența dintre RGB și RGB D
O imagine RGB-D este pur și simplu o combinație între o imagine RGB și imaginea de adâncime corespunzătoare a acesteia. O imagine de adâncime este un canal de imagine în care fiecare pixel se referă la o distanță între planul imaginii și obiectul corespunzător în imaginea RGB. Puteți utiliza Kinect pentru a capta astfel de imagini RGB-D.
[/wpremark]
[wPremark preset_name = “chat_message_1_my” picon_show = “0” fundal_color = “#e0f3ff” padding_right = “30” padding_left = “30” 30 “border_radius =” 30 “] Care este cea mai mică calitate a camerei
256×256 – Găsit pe camere foarte ieftine, această rezoluție este atât de scăzută încât calitatea imaginii este aproape întotdeauna inacceptabilă. Este vorba de 65.000 de pixeli totali. 640×480 – Acesta este capătul scăzut la majoritatea "real" Camere. Această rezoluție este ideală pentru poze prin e-mail sau postarea de imagini pe un site web.
[/wpremark]
[wPremark preset_name = “chat_message_1_my” picon_show = “0” fundal_color = “#e0f3ff” padding_right = “30” padding_left = “30” 30 “border_radius =” 30 “] Care este cea mai simplă cameră din lume
Faceți cunoștință cu Solarcan Puck – cea mai simplă cameră din lume.
[/wpremark]
[wPremark preset_name = “chat_message_1_my” picon_show = “0” fundal_color = “#e0f3ff” padding_right = “30” padding_left = “30” 30 “border_radius =” 30 “] Care sunt contra RGB
RGB constă standardul industriei – mai frecvent în designul web decât imprimarea.Nu toată lumea va lucra cu imagini RGB.Se bazează oarecum pe lumină, ceea ce imprimarea nu oferă așa cum o face un monitor de computer.Ar putea fi o ușoară schimbare de culoare de la ecran la imprimare.
[/wpremark]
[wPremark preset_name = “chat_message_1_my” picon_show = “0” fundal_color = “#e0f3ff” padding_right = “30” padding_left = “30” 30 “border_radius =” 30 “] Care este cel mai bun cadru RGB pentru ochi
În mod normal, doriți să aveți un contrast de 1: 1000. Cel mai strălucitor loc va emite 1000x mai multă lumină decât cel mai întunecat loc. Este în regulă, deoarece cu cât contrastul este mai mare, cu atât va fi mai provocator pentru ochii tăi.
[/wpremark]
[wPremark preset_name = “chat_message_1_my” picon_show = “0” fundal_color = “#e0f3ff” padding_right = “30” padding_left = “30” 30 “border_radius =” 30 “] Care este diferența dintre imaginea RGB și imaginea de adâncime
O imagine RGB-D este pur și simplu o combinație între o imagine RGB și imaginea de adâncime corespunzătoare a acesteia. O imagine de adâncime este un canal de imagine în care fiecare pixel se referă la o distanță între planul imaginii și obiectul corespunzător în imaginea RGB.
[/wpremark]
[wPremark preset_name = “chat_message_1_my” picon_show = “0” fundal_color = “#e0f3ff” padding_right = “30” padding_left = “30” 30 “border_radius =” 30 “] De ce este Elon Musk împotriva lui Lidar
Primul este că este foarte scump. Al doilea, pe de altă parte, este aproape filosofic. Musk însuși a explicat că „montarea lidarelor pe mașină înseamnă să -l umpleți cu apendice scumpe. Dar pe o mașină fiecare accesoriu adăugat este un lucru rău: este ridicol să umplem mașina cu aceste dispozitive.
[/wpremark]
[wPremark preset_name = “chat_message_1_my” picon_show = “0” fundal_color = “#e0f3ff” padding_right = “30” padding_left = “30” 30 “border_radius =” 30 “] De ce Tesla a încetat să mai folosească Lidar
El a mai spus că orice companie care se bazează pe acest tip de tehnologie este sortită. El susține că Lidar este prea scump și că cartografierea lumii și păstrarea acesteia sunt prea costisitoare. În schimb, Tesla se concentrează pe sistemele bazate pe viziune, despre care consideră că sunt mai eficiente și mai eficiente din punct de vedere al costurilor.
[/wpremark]

