Hva er RGB D -kamera?
Sammendrag
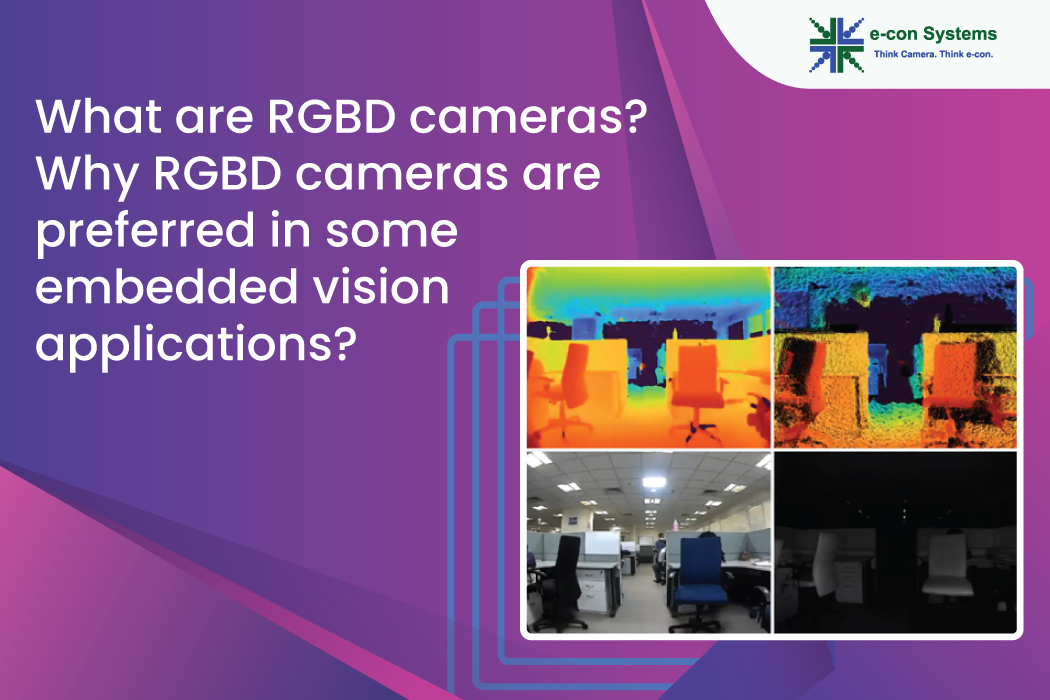
RGB-D refererer generelt til rød, grønn, blå pluss dybdedata fanget av RGB-D-sensorer. Et RGB-D-bilde gir en informasjon per piksel dybde på linje med tilsvarende bildepiksler.
Sammendrag – Lidar og RGB -kameraer er ofte brukte sensorer i autonome kjøretøyer. Begge har imidlertid begrensninger: Lidar gir nøyaktig dybde, men er sparsom i vertikal og horisontal oppløsning; RGB -bilder gir tett tekstur, men mangler dybdeinformasjon.
Presisjonen til begge systemene var omtrent 1.00, som er klinisk akseptabelt.
Forbruker RGB-D-sensorer: Imidlertid koster disse sensorene rundt $ 10.000 hver. Derimot koster nye forbruker RGB-D-sensorer mindre enn $ 200. Per-Pixel dybdesenseringsteknologi som brukes i forbruker RGB-D-kameraer ble utviklet av PrimeSense.
Som nevnt over klarer ikke RGB-D-kameraet å fange objekter og overflater laget av gjennomsiktige, reflekterende og absorpsjonsmaterialer. I tillegg, når minst to kameraer brukes til å se den samme scenen, reduserer interferensproblemet kvaliteten på det estimerte dybdekartet.
Å legge til RGB -data til et 3D -dybdesenseringskameras punktsky eller dybdekart tillater å finne objekter mer effektivt for mønstergjenkjenning eller deteksjon. Dette er spesielt nyttig i applikasjoner som trenger å identifisere type og arten av objekter i scenen sammen med å måle dybden til dem.
Lidar vs -kameraer: Imidlertid er den grunnleggende forskjellen mellom Lidar og kamerateknologi at Lidar avgir lyset den ser, mens kameraer ikke gjør det. Dette gir Lidar muligheten til å beregne utrolig nøyaktige avstander til mange objekter som samtidig blir oppdaget.
Som nevnt over klarer ikke RGB-D-kameraet å fange objekter og overflater laget av gjennomsiktige, reflekterende og absorpsjonsmaterialer. I tillegg, når minst to kameraer brukes til å se den samme scenen, reduserer interferensproblemet kvaliteten på det estimerte dybdekartet.
Et RGB-D-bilde er ganske enkelt en kombinasjon av et RGB-bilde og det tilsvarende dybdebildet. Et dybdebilde er en bildekanal der hver piksel angår en avstand mellom bildeplanet og det tilsvarende objektet i RGB -bildet.
Som nevnt over klarer ikke RGB-D-kameraet å fange objekter og overflater laget av gjennomsiktige, reflekterende og absorpsjonsmaterialer. I tillegg, når minst to kameraer brukes til å se den samme scenen, reduserer interferensproblemet kvaliteten på det estimerte dybdekartet.
Den minste kommersielt tilgjengelige bildesensoren er OV6948, og måler 0.575 mm x 0.575 mm x 0.232 mm, laget av Omnivision Technologies, Inc. (USA).
Spørsmål og svar
1. Hva betyr RGBD på et kamera?
RGB-D refererer generelt til rød, grønn, blå pluss dybdedata fanget av RGB-D-sensorer. Et RGB-D-bilde gir en informasjon per piksel dybde på linje med tilsvarende bildepiksler.
2. Hva er forskjellen mellom RGB-D-kamera og Lidar?
Sammendrag – Lidar og RGB -kameraer er ofte brukte sensorer i autonome kjøretøyer. Begge har imidlertid begrensninger: Lidar gir nøyaktig dybde, men er sparsom i vertikal og horisontal oppløsning; RGB -bilder gir tett tekstur, men mangler dybdeinformasjon.
3. Hvor nøyaktig er et RGB-D-kamera?
Presisjonen til begge systemene var omtrent 1.00, som er klinisk akseptabelt.
4. Hvor mye koster RGB-D-kameraer?
Forbruker RGB-D-sensorer: Imidlertid koster disse sensorene rundt $ 10.000 hver. Derimot koster nye forbruker RGB-D-sensorer mindre enn $ 200. Per-Pixel dybdesenseringsteknologi som brukes i forbruker RGB-D-kameraer ble utviklet av PrimeSense.
5. Hva er ulempene med RGB-D-kamera?
Som nevnt over klarer ikke RGB-D-kameraet å fange objekter og overflater laget av gjennomsiktige, reflekterende og absorpsjonsmaterialer. I tillegg, når minst to kameraer brukes til å se den samme scenen, reduserer interferensproblemet kvaliteten på det estimerte dybdekartet.
6. Hva er fordelene med RGB-D-kameraer?
Å legge til RGB -data til et 3D -dybdesenseringskameras punktsky eller dybdekart tillater å finne objekter mer effektivt for mønstergjenkjenning eller deteksjon. Dette er spesielt nyttig i applikasjoner som trenger å identifisere type og arten av objekter i scenen sammen med å måle dybden til dem.
7. Som er bedre lidar eller kameraer?
Lidar vs -kameraer: Imidlertid er den grunnleggende forskjellen mellom Lidar og kamerateknologi at Lidar avgir lyset den ser, mens kameraer ikke gjør det. Dette gir Lidar muligheten til å beregne utrolig nøyaktige avstander til mange objekter som samtidig blir oppdaget.
8. Hva er ulempene med RGB-D-kamera?
Som nevnt over klarer ikke RGB-D-kameraet å fange objekter og overflater laget av gjennomsiktige, reflekterende og absorpsjonsmaterialer. I tillegg, når minst to kameraer brukes til å se den samme scenen, reduserer interferensproblemet kvaliteten på det estimerte dybdekartet.
9. Hva er forskjellen mellom RGB og RGB-D?
Et RGB-D-bilde er ganske enkelt en kombinasjon av et RGB-bilde og det tilsvarende dybdebildet. Et dybdebilde er en bildekanal der hver piksel angår en avstand mellom bildeplanet og det tilsvarende objektet i RGB -bildet.
10. Hva er ulempene med RGB-D-kamera?
Som nevnt over klarer ikke RGB-D-kameraet å fange objekter og overflater laget av gjennomsiktige, reflekterende og absorpsjonsmaterialer. I tillegg, når minst to kameraer brukes til å se den samme scenen, reduserer interferensproblemet kvaliteten på det estimerte dybdekartet.
11. Hva er det minste RGB -kameraet?
Den minste kommersielt tilgjengelige bildesensoren er OV6948, og måler 0.575 mm x 0.575 mm x 0.232 mm, laget av Omnivision Technologies, Inc. (USA).
[WPremark Preset_name = “Chat_Message_1_My” Icon_Show = “0” BAKGRUNT_COLOR = “#E0F3FF” Padding_right = “30” Padding_left = “30” Border_Radius = “30”] [WPremark_icon Icon = “Quote-LEFT-2-SOLILIDTH =” 32 “høyde =” 32 “] Hva betyr RGBD på kamera
RGB-D refererer generelt til rød, grønn, blå pluss dybdedata fanget av RGB-D-sensorer. Et RGB-D-bilde gir en informasjon per piksel dybde på linje med tilsvarende bildepiksler.
[/WPremark]
[WPremark Preset_name = “Chat_Message_1_My” Icon_Show = “0” BAKGRUNT_COLOR = “#E0F3FF” Padding_right = “30” Padding_left = “30” Border_Radius = “30”] [WPremark_icon Icon = “Quote-LEFT-2-SOLILIDTH =” 32 “høyde =” 32 “] Hva er forskjellen mellom RGB-D-kamera og Lidar
Sammendrag – Lidar og RGB -kameraer er ofte brukte sensorer i autonome kjøretøyer. Begge har imidlertid begrensninger: Lidar gir nøyaktig dybde, men er sparsom i vertikal og horisontal oppløsning; RGB -bilder gir tett tekstur, men mangler dybdeinformasjon.
[/WPremark]
[WPremark Preset_name = “Chat_Message_1_My” Icon_Show = “0” BAKGRUNT_COLOR = “#E0F3FF” Padding_right = “30” Padding_left = “30” Border_Radius = “30”] [WPremark_icon Icon = “Quote-LEFT-2-SOLILIDTH =” 32 “høyde =” 32 “] Hvor nøyaktig er RGB-D-kamera
Presisjonen til begge systemene var omtrent 1.00, som er klinisk akseptabelt.
[/WPremark]
[WPremark Preset_name = “Chat_Message_1_My” Icon_Show = “0” BAKGRUNT_COLOR = “#E0F3FF” Padding_right = “30” Padding_left = “30” Border_Radius = “30”] [WPremark_icon Icon = “Quote-LEFT-2-SOLILIDTH =” 32 “høyde =” 32 “] Hvor mye koster RGB-D-kameraer
Forbruker RGB-D-sensorer
Imidlertid koster disse sensorene rundt $ 10.000 hver. Derimot koster nye forbruker RGB-D-sensorer mindre enn $ 200. Per-Pixel dybdesenseringsteknologi som brukes i forbruker RGB-D-kameraer ble utviklet av PrimeSense (http: // www.primerse.COM/EN/TECHNOLOGIC/115-PRIMEMESENSE-3D-SENSING-SOLUTION).
Cachedsimilar
[/WPremark]
[WPremark Preset_name = “Chat_Message_1_My” Icon_Show = “0” BAKGRUNT_COLOR = “#E0F3FF” Padding_right = “30” Padding_left = “30” Border_Radius = “30”] [WPremark_icon Icon = “Quote-LEFT-2-SOLILIDTH =” 32 “høyde =” 32 “] Hva er ulempene med RGB-D-kamera
Som nevnt over klarer ikke RGB-D-kameraet å fange objekter og overflater laget av gjennomsiktige, reflekterende og absorpsjonsmaterialer. I tillegg når minst to kameraer brukes til å se den samme scenen, reduserer interferensproblemet kvaliteten på det estimerte dybdekartet.
[/WPremark]
[WPremark Preset_name = “Chat_Message_1_My” Icon_Show = “0” BAKGRUNT_COLOR = “#E0F3FF” Padding_right = “30” Padding_left = “30” Border_Radius = “30”] [WPremark_icon Icon = “Quote-LEFT-2-SOLILIDTH =” 32 “høyde =” 32 “] Hva er fordelene med RGBD -kameraer
Å legge til RGB -data til et 3D -dybdesenseringskameraens punktsky eller dybdekart gjør det mulig å finne objekter mer effektivt for mønstergjenkjenning eller deteksjon. Dette er spesielt nyttig i applikasjoner som trenger å identifisere type og arten av objekter i scenen sammen med å måle dybden til dem.
[/WPremark]
[WPremark Preset_name = “Chat_Message_1_My” Icon_Show = “0” BAKGRUNT_COLOR = “#E0F3FF” Padding_right = “30” Padding_left = “30” Border_Radius = “30”] [WPremark_icon Icon = “Quote-LEFT-2-SOLILIDTH =” 32 “høyde =” 32 “] Som er bedre lidar eller kameraer
LIDAR VS -kameraer
Imidlertid er den grunnleggende forskjellen mellom LiDar og kamerateknologi at LiDar avgir lyset den ser, mens kameraer ikke gjør det. Dette gir Lidar muligheten til å beregne utrolig nøyaktige avstander til mange objekter som samtidig blir oppdaget.
[/WPremark]
[WPremark Preset_name = “Chat_Message_1_My” Icon_Show = “0” BAKGRUNT_COLOR = “#E0F3FF” Padding_right = “30” Padding_left = “30” Border_Radius = “30”] [WPremark_icon Icon = “Quote-LEFT-2-SOLILIDTH =” 32 “høyde =” 32 “] Hva er ulempene med RGB-D-kamera
Som nevnt over klarer ikke RGB-D-kameraet å fange objekter og overflater laget av gjennomsiktige, reflekterende og absorpsjonsmaterialer. I tillegg når minst to kameraer brukes til å se den samme scenen, reduserer interferensproblemet kvaliteten på det estimerte dybdekartet.
[/WPremark]
[WPremark Preset_name = “Chat_Message_1_My” Icon_Show = “0” BAKGRUNT_COLOR = “#E0F3FF” Padding_right = “30” Padding_left = “30” Border_Radius = “30”] [WPremark_icon Icon = “Quote-LEFT-2-SOLILIDTH =” 32 “høyde =” 32 “] Hva er forskjellen mellom RGB og RGB-D
Et RGB-D-bilde er ganske enkelt en kombinasjon av et RGB-bilde og det tilsvarende dybdebildet. Et dybdebilde er en bildekanal der hver piksel angår en avstand mellom bildeplanet og det tilsvarende objektet i RGB -bildet.
[/WPremark]
[WPremark Preset_name = “Chat_Message_1_My” Icon_Show = “0” BAKGRUNT_COLOR = “#E0F3FF” Padding_right = “30” Padding_left = “30” Border_Radius = “30”] [WPremark_icon Icon = “Quote-LEFT-2-SOLILIDTH =” 32 “høyde =” 32 “] Hva er ulempene med RGB D -kamera
Som nevnt over klarer ikke RGB-D-kameraet å fange objekter og overflater laget av gjennomsiktige, reflekterende og absorpsjonsmaterialer. I tillegg når minst to kameraer brukes til å se den samme scenen, reduserer interferensproblemet kvaliteten på det estimerte dybdekartet.
[/WPremark]
[WPremark Preset_name = “Chat_Message_1_My” Icon_Show = “0” BAKGRUNT_COLOR = “#E0F3FF” Padding_right = “30” Padding_left = “30” Border_Radius = “30”] [WPremark_icon Icon = “Quote-LEFT-2-SOLILIDTH =” 32 “høyde =” 32 “] Hva er det minste RGB -kameraet
Den minste kommersielt tilgjengelige bildesensoren er OV6948, og måler 0.575 mm x 0.575 mm x 0.232 mm, laget av Omnivision Technologies, Inc. (USA). Rekorden er basert på produkttesting og markedsundersøkelser utført av Transparency Market Research i Pune, India, 10. april 2019.
[/WPremark]
[WPremark Preset_name = “Chat_Message_1_My” Icon_Show = “0” BAKGRUNT_COLOR = “#E0F3FF” Padding_right = “30” Padding_left = “30” Border_Radius = “30”] [WPremark_icon Icon = “Quote-LEFT-2-SOLILIDTH =” 32 “høyde =” 32 “] Er RGB bra for øynene
Svaret er nei. Det er ikke noe spesielt med RGB -belysning og LED -belysning, lys er lett, og så lenge intensiteten av synlig lys er innenfor trygge grenser, vil det ikke skade noens øyne. Hvis noe, er RGB -lys som LED -lys ved at de er tryggere fordi de ikke produserer UV -lys.
[/WPremark]
[WPremark Preset_name = “Chat_Message_1_My” Icon_Show = “0” BAKGRUNT_COLOR = “#E0F3FF” Padding_right = “30” Padding_left = “30” Border_Radius = “30”] [WPremark_icon Icon = “Quote-LEFT-2-SOLILIDTH =” 32 “høyde =” 32 “] Hva er forskjellen mellom dybdekamera og RGB -kamera
Dybdeinformasjon kan hentes gjennom et dybdekart/bilde som er opprettet av en 3D -dybdesensor som en stereosensor eller tid for flygesensor. RGBD-kameraer er i stand til å gjøre en piksel-til-piksel sammenslåing av RGB-data og dybdeinformasjon for å levere både i en enkelt ramme.
[/WPremark]
[WPremark Preset_name = “Chat_Message_1_My” Icon_Show = “0” BAKGRUNT_COLOR = “#E0F3FF” Padding_right = “30” Padding_left = “30” Border_Radius = “30”] [WPremark_icon Icon = “Quote-LEFT-2-SOLILIDTH =” 32 “høyde =” 32 “] Hvordan fungerer RGBD -sensor
RGB-D-sensorer er en spesifikk type dybdesenserende enheter som fungerer i forbindelse med en RGB (rød, grønn og blå farge) sensorkamera. De er i stand til å forsterke det konvensjonelle bildet med dybdeinformasjon (relatert til avstanden til sensoren) på per piksel basis.
[/WPremark]
[WPremark Preset_name = “Chat_Message_1_My” Icon_Show = “0” BAKGRUNT_COLOR = “#E0F3FF” Padding_right = “30” Padding_left = “30” Border_Radius = “30”] [WPremark_icon Icon = “Quote-LEFT-2-SOLILIDTH =” 32 “høyde =” 32 “] Hva er ulempen med Lidar
En annen ulempe med å bruke LIDAR -data for terrenganalyse er vanskeligheten og usikkerheten ved tolkning og analyse av data. LiDAR -data kan gi rik og detaljert informasjon om terrenget, men det kan også være tvetydig og sammensatt å tolke og analysere.
[/WPremark]
[WPremark Preset_name = “Chat_Message_1_My” Icon_Show = “0” BAKGRUNT_COLOR = “#E0F3FF” Padding_right = “30” Padding_left = “30” Border_Radius = “30”] [WPremark_icon Icon = “Quote-LEFT-2-SOLILIDTH =” 32 “høyde =” 32 “] Hva er ulempene med LiDAR -kameraet
– Begrensninger i Drone Lidarmuch større investering i utstyr (sammenlignet med andre teknologier), så selv om det er økonomisk når det brukes på store skalaer, kan det være dyrt for å fange opp data i mindre områder.Nøyaktighet er veldig avhengig av kvaliteten og kalibreringen av systemets skanner, IMU og GNSS -komponenter.
[/WPremark]
[WPremark Preset_name = “Chat_Message_1_My” Icon_Show = “0” BAKGRUNT_COLOR = “#E0F3FF” Padding_right = “30” Padding_left = “30” Border_Radius = “30”] [WPremark_icon Icon = “Quote-LEFT-2-SOLILIDTH =” 32 “høyde =” 32 “] Hva er argb d -sensor
RGB-D-sensorer er en spesifikk type dybdesenserende enheter som fungerer i forbindelse med en RGB (rød, grønn og blå farge) sensorkamera. De er i stand til å forsterke det konvensjonelle bildet med dybdeinformasjon (relatert til avstanden til sensoren) på per piksel basis.
[/WPremark]
[WPremark Preset_name = “Chat_Message_1_My” Icon_Show = “0” BAKGRUNT_COLOR = “#E0F3FF” Padding_right = “30” Padding_left = “30” Border_Radius = “30”] [WPremark_icon Icon = “Quote-LEFT-2-SOLILIDTH =” 32 “høyde =” 32 “] Hva er forskjellen mellom RGB og RGB D
Et RGB-D-bilde er ganske enkelt en kombinasjon av et RGB-bilde og det tilsvarende dybdebildet. Et dybdebilde er en bildekanal der hver piksel angår en avstand mellom bildeplanet og det tilsvarende objektet i RGB -bildet. Du kan bruke Kinect til å ta slike RGB-D-bilder.
[/WPremark]
[WPremark Preset_name = “Chat_Message_1_My” Icon_Show = “0” BAKGRUNT_COLOR = “#E0F3FF” Padding_right = “30” Padding_left = “30” Border_Radius = “30”] [WPremark_icon Icon = “Quote-LEFT-2-SOLILIDTH =” 32 “høyde =” 32 “] Hva er den laveste kamerakvaliteten
256×256 – Funnet på veldig billige kameraer, denne oppløsningen er så lav at bildekvaliteten nesten alltid er uakseptabel. Dette er 65 000 totalt piksler. 640×480 – Dette er den lave enden på de fleste "ekte" kameraer. Denne oppløsningen er ideell for e-postbilder eller legger ut bilder på et nettsted.
[/WPremark]
[WPremark Preset_name = “Chat_Message_1_My” Icon_Show = “0” BAKGRUNT_COLOR = “#E0F3FF” Padding_right = “30” Padding_left = “30” Border_Radius = “30”] [WPremark_icon Icon = “Quote-LEFT-2-SOLILIDTH =” 32 “høyde =” 32 “] Hva er verdens enkleste kamera
Møt Solarcan Puck – Verdens enkleste kamera.
[/WPremark]
[WPremark Preset_name = “Chat_Message_1_My” Icon_Show = “0” BAKGRUNT_COLOR = “#E0F3FF” Padding_right = “30” Padding_left = “30” Border_Radius = “30”] [WPremark_icon Icon = “Quote-LEFT-2-SOLILIDTH =” 32 “høyde =” 32 “] Hva er ulemper med RGB
RGB Consnot bransjestandarden – mer vanlig innen webdesign enn utskrift.Ikke alle vil jobbe med RGB -bilder.Er avhengig av lys, hvilken utskrift som ikke gir som en dataskjerm gjør.Kan være et lite fargeskifte fra skjerm til utskrift.
[/WPremark]
[WPremark Preset_name = “Chat_Message_1_My” Icon_Show = “0” BAKGRUNT_COLOR = “#E0F3FF” Padding_right = “30” Padding_left = “30” Border_Radius = “30”] [WPremark_icon Icon = “Quote-LEFT-2-SOLILIDTH =” 32 “høyde =” 32 “] Hva er den beste RGB -innstillingen for øynene
Normalt vil du ha en kontrast på 1: 1000. Det lyseste stedet vil avgi 1000 ganger mer lys enn det mørkeste stedet. Det er ok fordi jo høyere kontrasten er, jo mer utfordrende vil det være for øynene dine.
[/WPremark]
[WPremark Preset_name = “Chat_Message_1_My” Icon_Show = “0” BAKGRUNT_COLOR = “#E0F3FF” Padding_right = “30” Padding_left = “30” Border_Radius = “30”] [WPremark_icon Icon = “Quote-LEFT-2-SOLILIDTH =” 32 “høyde =” 32 “] Hva er forskjellen mellom RGB -bilde og dybdebilde
Et RGB-D-bilde er ganske enkelt en kombinasjon av et RGB-bilde og det tilsvarende dybdebildet. Et dybdebilde er en bildekanal der hver piksel angår en avstand mellom bildeplanet og det tilsvarende objektet i RGB -bildet.
[/WPremark]
[WPremark Preset_name = “Chat_Message_1_My” Icon_Show = “0” BAKGRUNT_COLOR = “#E0F3FF” Padding_right = “30” Padding_left = “30” Border_Radius = “30”] [WPremark_icon Icon = “Quote-LEFT-2-SOLILIDTH =” 32 “høyde =” 32 “] Hvorfor er Elon Musk mot Lidar
Den første er at det er veldig dyrt. Den andre, derimot, er nesten filosofisk. Musk forklarte selv at “montering av lidarer på bilen betyr å fylle den med dyre vedheng. Men på en bil er hvert ekstra tilbehør en dårlig ting: det er latterlig å fylle bilen med disse enhetene.
[/WPremark]
[WPremark Preset_name = “Chat_Message_1_My” Icon_Show = “0” BAKGRUNT_COLOR = “#E0F3FF” Padding_right = “30” Padding_left = “30” Border_Radius = “30”] [WPremark_icon Icon = “Quote-LEFT-2-SOLILIDTH =” 32 “høyde =” 32 “] Hvorfor sluttet Tesla å bruke Lidar
Han har også sagt at ethvert selskap som er avhengig av denne typen teknologier er dømt. Han argumenterer for at Lidar er for dyr og at å kartlegge verden og holde den oppdatert er for kostbar. I stedet fokuserer Tesla på synsbaserte systemer, som han mener er mer effektive og kostnadseffektive.
[/WPremark]

